Problem s prodavačem koji putuje pomoću podružnice i veza

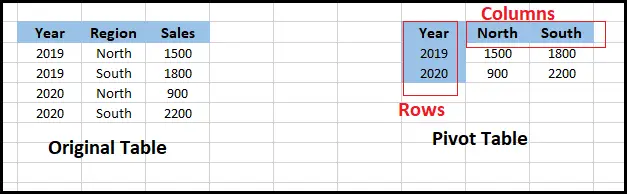
S obzirom na skup gradova i udaljenost između svakog para gradova, problem je pronaći najkraću moguću turneju koja posjećuje svaki grad točno jednom i vraća se na početnu točku.

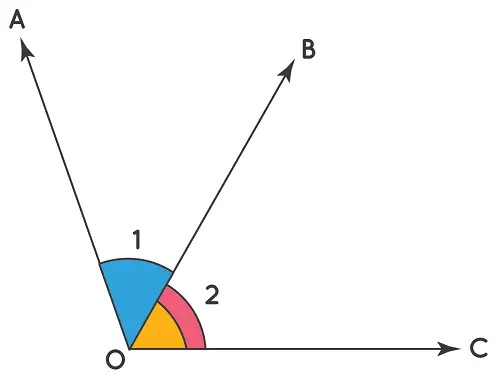
Na primjer, razmotrite grafikon prikazan na slici s desne strane. TSP turneja na grafikonu je 0-1-3-2-0. Trošak turneje je 10+25+30+15 koji je 80.
Razgovarali smo o sljedećim rješenjima
1) Naivno i dinamično programiranje
2) Približno rješenje pomoću MST -a
Grana i vezana otopina
Kao što se vidi u prethodnim člancima u grani i vezanoj metodi za trenutni čvor u stablu, izračunavamo vezanu na najboljem mogućem rješenju koje možemo dobiti ako spustimo ovaj čvor. Ako je sama vezana za najbolje moguće rješenje gori od trenutnog trenutnog (najbolje izračunato do sada), tada zanemarimo podređenje ukorijenjeno s čvorom.
Imajte na umu da trošak kroz čvor uključuje dva troškova.
1) Trošak dostizanja čvora iz korijena (kada dođemo do čvora, izračunali smo ovaj trošak)
2) Trošak dostizanja odgovora iz trenutnog čvora na list (izračunavamo ograničenje ovog troška kako bismo odlučili hoćemo li zanemariti subtree s ovim čvorom ili ne).
- U slučajevima a Problem s maksimizacijom Gornja granica govori nam da je maksimalno moguće rješenje ako slijedimo zadani čvor. Na primjer u 0/1 Krkati koristili smo pohlepni pristup da bismo pronašli gornju granicu .
- U slučajevima a Problem s minimiziranjem Donja veza govori nam o minimalnom mogućem rješenju ako slijedimo dani čvor. Na primjer u Problem s zadatkom Dobivamo nižu granicu tako što će radniku dodijeliti posao s najmanje troškova.
U grani i vezani izazovni dio je pronalazak načina izračunavanja veza na najbolje moguće rješenje. Ispod je ideja koja se koristi za izračunavanje granica za problem putničkog prodavača.
Trošak bilo koje turneje može se napisati kao u nastavku.
Cost of a tour T = (1/2) * ? (Sum of cost of two edges adjacent to u and in the tour T) where u ? V For every vertex u if we consider two edges through it in T and sum their costs. The overall sum for all vertices would be twice of cost of tour T (We have considered every edge twice.) (Sum of two tour edges adjacent to u) >= (sum of minimum weight two edges adjacent to u) Cost of any tour >= 1/2) * ? (Sum of cost of two minimum weight edges adjacent to u) where u ? V
Na primjer, razmotrite gornji prikazani grafikon. Ispod su minimalni trošak dva ruba u blizini svakog čvora.
Node Least cost edges Total cost 0 (0 1) (0 2) 25 1 (0 1) (1 3) 35 2 (0 2) (2 3) 45 3 (0 3) (1 3) 45 Thus a lower bound on the cost of any tour = 1/2(25 + 35 + 45 + 45) = 75 Refer this for one more example.
Sada imamo ideju o izračunavanju donje granice. Pogledajmo kako primijeniti stablo za pretraživanje prostora. Počinjemo nabrajati sve moguće čvorove (po mogućnosti leksikografskim redoslijedom)
1. Korijenski čvor: Bez gubitka općenitosti pretpostavljamo da započinjemo s Vertexom '0' za koji je donja granica izračunata gore.
Suočavanje s razinom 2: Sljedeća razina nabraja sve moguće vrhove na koje možemo ići (imajući na umu da se na bilo kojem putu vršica mora pojaviti samo jednom) koji su 1 2 3 ... n (imajte na umu da je graf dovršen). Razmotrimo da izračunavamo za Vertex 1 jer smo se preselili s 0 na 1, naša je turneja sada uključivala Edge 0-1. To nam omogućava da napravimo potrebne promjene u donjoj granici korijena.
Lower Bound for vertex 1 = Old lower bound - ((minimum edge cost of 0 + minimum edge cost of 1) / 2) + (edge cost 0-1)
Kako djeluje? Da bismo uključili Edge 0-1, dodajemo rubni trošak od 0-1 i oduzimamo rubnu težinu tako da donja granica ostaje što je moguće čvrsta, što bi bio zbroj minimalnih rubova od 0 i 1 podijeljen s 2. Jasno je da se rub oduzima ne može biti manji od ovoga.
Suočavanje s drugim razinama: Kako prelazimo na sljedeću razinu, opet nabrajamo sve moguće vrhove. Za gornji slučaj koji ide dalje nakon 1 provjerimo 2 3 4 ... n.
Razmotrite donju granicu za 2 dok smo se premjestili s 1 na 1, uključimo rub 1-2 u turneju i izmijenimo novu donju granicu za ovaj čvor.
Lower bound(2) = Old lower bound - ((second minimum edge cost of 1 + minimum edge cost of 2)/2) + edge cost 1-2)
NAPOMENA: Jedina promjena u formuli je da smo ovaj put uvrstili drugi minimalni trošak za 1 jer je minimalni trošak ruba već oduzet na prethodnoj razini.
// C++ program to solve Traveling Salesman Problem // using Branch and Bound. #include using namespace std ; const int N = 4 ; // final_path[] stores the final solution ie the // path of the salesman. int final_path [ N + 1 ]; // visited[] keeps track of the already visited nodes // in a particular path bool visited [ N ]; // Stores the final minimum weight of shortest tour. int final_res = INT_MAX ; // Function to copy temporary solution to // the final solution void copyToFinal ( int curr_path []) { for ( int i = 0 ; i < N ; i ++ ) final_path [ i ] = curr_path [ i ]; final_path [ N ] = curr_path [ 0 ]; } // Function to find the minimum edge cost // having an end at the vertex i int firstMin ( int adj [ N ][ N ] int i ) { int min = INT_MAX ; for ( int k = 0 ; k < N ; k ++ ) if ( adj [ i ][ k ] < min && i != k ) min = adj [ i ][ k ]; return min ; } // function to find the second minimum edge cost // having an end at the vertex i int secondMin ( int adj [ N ][ N ] int i ) { int first = INT_MAX second = INT_MAX ; for ( int j = 0 ; j < N ; j ++ ) { if ( i == j ) continue ; if ( adj [ i ][ j ] <= first ) { second = first ; first = adj [ i ][ j ]; } else if ( adj [ i ][ j ] <= second && adj [ i ][ j ] != first ) second = adj [ i ][ j ]; } return second ; } // function that takes as arguments: // curr_bound -> lower bound of the root node // curr_weight-> stores the weight of the path so far // level-> current level while moving in the search // space tree // curr_path[] -> where the solution is being stored which // would later be copied to final_path[] void TSPRec ( int adj [ N ][ N ] int curr_bound int curr_weight int level int curr_path []) { // base case is when we have reached level N which // means we have covered all the nodes once if ( level == N ) { // check if there is an edge from last vertex in // path back to the first vertex if ( adj [ curr_path [ level -1 ]][ curr_path [ 0 ]] != 0 ) { // curr_res has the total weight of the // solution we got int curr_res = curr_weight + adj [ curr_path [ level -1 ]][ curr_path [ 0 ]]; // Update final result and final path if // current result is better. if ( curr_res < final_res ) { copyToFinal ( curr_path ); final_res = curr_res ; } } return ; } // for any other level iterate for all vertices to // build the search space tree recursively for ( int i = 0 ; i < N ; i ++ ) { // Consider next vertex if it is not same (diagonal // entry in adjacency matrix and not visited // already) if ( adj [ curr_path [ level -1 ]][ i ] != 0 && visited [ i ] == false ) { int temp = curr_bound ; curr_weight += adj [ curr_path [ level -1 ]][ i ]; // different computation of curr_bound for // level 2 from the other levels if ( level == 1 ) curr_bound -= (( firstMin ( adj curr_path [ level -1 ]) + firstMin ( adj i )) / 2 ); else curr_bound -= (( secondMin ( adj curr_path [ level -1 ]) + firstMin ( adj i )) / 2 ); // curr_bound + curr_weight is the actual lower bound // for the node that we have arrived on // If current lower bound < final_res we need to explore // the node further if ( curr_bound + curr_weight < final_res ) { curr_path [ level ] = i ; visited [ i ] = true ; // call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path ); } // Else we have to prune the node by resetting // all changes to curr_weight and curr_bound curr_weight -= adj [ curr_path [ level -1 ]][ i ]; curr_bound = temp ; // Also reset the visited array memset ( visited false sizeof ( visited )); for ( int j = 0 ; j <= level -1 ; j ++ ) visited [ curr_path [ j ]] = true ; } } } // This function sets up final_path[] void TSP ( int adj [ N ][ N ]) { int curr_path [ N + 1 ]; // Calculate initial lower bound for the root node // using the formula 1/2 * (sum of first min + // second min) for all edges. // Also initialize the curr_path and visited array int curr_bound = 0 ; memset ( curr_path -1 sizeof ( curr_path )); memset ( visited 0 sizeof ( curr_path )); // Compute initial bound for ( int i = 0 ; i < N ; i ++ ) curr_bound += ( firstMin ( adj i ) + secondMin ( adj i )); // Rounding off the lower bound to an integer curr_bound = ( curr_bound & 1 ) ? curr_bound / 2 + 1 : curr_bound / 2 ; // We start at vertex 1 so the first vertex // in curr_path[] is 0 visited [ 0 ] = true ; curr_path [ 0 ] = 0 ; // Call to TSPRec for curr_weight equal to // 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path ); } // Driver code int main () { //Adjacency matrix for the given graph int adj [ N ][ N ] = { { 0 10 15 20 } { 10 0 35 25 } { 15 35 0 30 } { 20 25 30 0 } }; TSP ( adj ); printf ( 'Minimum cost : %d n ' final_res ); printf ( 'Path Taken : ' ); for ( int i = 0 ; i <= N ; i ++ ) printf ( '%d ' final_path [ i ]); return 0 ; }
Java // Java program to solve Traveling Salesman Problem // using Branch and Bound. import java.util.* ; class GFG { static int N = 4 ; // final_path[] stores the final solution ie the // path of the salesman. static int final_path [] = new int [ N + 1 ] ; // visited[] keeps track of the already visited nodes // in a particular path static boolean visited [] = new boolean [ N ] ; // Stores the final minimum weight of shortest tour. static int final_res = Integer . MAX_VALUE ; // Function to copy temporary solution to // the final solution static void copyToFinal ( int curr_path [] ) { for ( int i = 0 ; i < N ; i ++ ) final_path [ i ] = curr_path [ i ] ; final_path [ N ] = curr_path [ 0 ] ; } // Function to find the minimum edge cost // having an end at the vertex i static int firstMin ( int adj [][] int i ) { int min = Integer . MAX_VALUE ; for ( int k = 0 ; k < N ; k ++ ) if ( adj [ i ][ k ] < min && i != k ) min = adj [ i ][ k ] ; return min ; } // function to find the second minimum edge cost // having an end at the vertex i static int secondMin ( int adj [][] int i ) { int first = Integer . MAX_VALUE second = Integer . MAX_VALUE ; for ( int j = 0 ; j < N ; j ++ ) { if ( i == j ) continue ; if ( adj [ i ][ j ] <= first ) { second = first ; first = adj [ i ][ j ] ; } else if ( adj [ i ][ j ] <= second && adj [ i ][ j ] != first ) second = adj [ i ][ j ] ; } return second ; } // function that takes as arguments: // curr_bound -> lower bound of the root node // curr_weight-> stores the weight of the path so far // level-> current level while moving in the search // space tree // curr_path[] -> where the solution is being stored which // would later be copied to final_path[] static void TSPRec ( int adj [][] int curr_bound int curr_weight int level int curr_path [] ) { // base case is when we have reached level N which // means we have covered all the nodes once if ( level == N ) { // check if there is an edge from last vertex in // path back to the first vertex if ( adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]] != 0 ) { // curr_res has the total weight of the // solution we got int curr_res = curr_weight + adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]] ; // Update final result and final path if // current result is better. if ( curr_res < final_res ) { copyToFinal ( curr_path ); final_res = curr_res ; } } return ; } // for any other level iterate for all vertices to // build the search space tree recursively for ( int i = 0 ; i < N ; i ++ ) { // Consider next vertex if it is not same (diagonal // entry in adjacency matrix and not visited // already) if ( adj [ curr_path [ level - 1 ]][ i ] != 0 && visited [ i ] == false ) { int temp = curr_bound ; curr_weight += adj [ curr_path [ level - 1 ]][ i ] ; // different computation of curr_bound for // level 2 from the other levels if ( level == 1 ) curr_bound -= (( firstMin ( adj curr_path [ level - 1 ] ) + firstMin ( adj i )) / 2 ); else curr_bound -= (( secondMin ( adj curr_path [ level - 1 ] ) + firstMin ( adj i )) / 2 ); // curr_bound + curr_weight is the actual lower bound // for the node that we have arrived on // If current lower bound < final_res we need to explore // the node further if ( curr_bound + curr_weight < final_res ) { curr_path [ level ] = i ; visited [ i ] = true ; // call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path ); } // Else we have to prune the node by resetting // all changes to curr_weight and curr_bound curr_weight -= adj [ curr_path [ level - 1 ]][ i ] ; curr_bound = temp ; // Also reset the visited array Arrays . fill ( visited false ); for ( int j = 0 ; j <= level - 1 ; j ++ ) visited [ curr_path [ j ]] = true ; } } } // This function sets up final_path[] static void TSP ( int adj [][] ) { int curr_path [] = new int [ N + 1 ] ; // Calculate initial lower bound for the root node // using the formula 1/2 * (sum of first min + // second min) for all edges. // Also initialize the curr_path and visited array int curr_bound = 0 ; Arrays . fill ( curr_path - 1 ); Arrays . fill ( visited false ); // Compute initial bound for ( int i = 0 ; i < N ; i ++ ) curr_bound += ( firstMin ( adj i ) + secondMin ( adj i )); // Rounding off the lower bound to an integer curr_bound = ( curr_bound == 1 ) ? curr_bound / 2 + 1 : curr_bound / 2 ; // We start at vertex 1 so the first vertex // in curr_path[] is 0 visited [ 0 ] = true ; curr_path [ 0 ] = 0 ; // Call to TSPRec for curr_weight equal to // 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path ); } // Driver code public static void main ( String [] args ) { //Adjacency matrix for the given graph int adj [][] = {{ 0 10 15 20 } { 10 0 35 25 } { 15 35 0 30 } { 20 25 30 0 } }; TSP ( adj ); System . out . printf ( 'Minimum cost : %dn' final_res ); System . out . printf ( 'Path Taken : ' ); for ( int i = 0 ; i <= N ; i ++ ) { System . out . printf ( '%d ' final_path [ i ] ); } } } /* This code contributed by PrinciRaj1992 */
Python3 # Python3 program to solve # Traveling Salesman Problem using # Branch and Bound. import math maxsize = float ( 'inf' ) # Function to copy temporary solution # to the final solution def copyToFinal ( curr_path ): final_path [: N + 1 ] = curr_path [:] final_path [ N ] = curr_path [ 0 ] # Function to find the minimum edge cost # having an end at the vertex i def firstMin ( adj i ): min = maxsize for k in range ( N ): if adj [ i ][ k ] < min and i != k : min = adj [ i ][ k ] return min # function to find the second minimum edge # cost having an end at the vertex i def secondMin ( adj i ): first second = maxsize maxsize for j in range ( N ): if i == j : continue if adj [ i ][ j ] <= first : second = first first = adj [ i ][ j ] elif ( adj [ i ][ j ] <= second and adj [ i ][ j ] != first ): second = adj [ i ][ j ] return second # function that takes as arguments: # curr_bound -> lower bound of the root node # curr_weight-> stores the weight of the path so far # level-> current level while moving # in the search space tree # curr_path[] -> where the solution is being stored # which would later be copied to final_path[] def TSPRec ( adj curr_bound curr_weight level curr_path visited ): global final_res # base case is when we have reached level N # which means we have covered all the nodes once if level == N : # check if there is an edge from # last vertex in path back to the first vertex if adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]] != 0 : # curr_res has the total weight # of the solution we got curr_res = curr_weight + adj [ curr_path [ level - 1 ]] [ curr_path [ 0 ]] if curr_res < final_res : copyToFinal ( curr_path ) final_res = curr_res return # for any other level iterate for all vertices # to build the search space tree recursively for i in range ( N ): # Consider next vertex if it is not same # (diagonal entry in adjacency matrix and # not visited already) if ( adj [ curr_path [ level - 1 ]][ i ] != 0 and visited [ i ] == False ): temp = curr_bound curr_weight += adj [ curr_path [ level - 1 ]][ i ] # different computation of curr_bound # for level 2 from the other levels if level == 1 : curr_bound -= (( firstMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ) else : curr_bound -= (( secondMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ) # curr_bound + curr_weight is the actual lower bound # for the node that we have arrived on. # If current lower bound < final_res # we need to explore the node further if curr_bound + curr_weight < final_res : curr_path [ level ] = i visited [ i ] = True # call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path visited ) # Else we have to prune the node by resetting # all changes to curr_weight and curr_bound curr_weight -= adj [ curr_path [ level - 1 ]][ i ] curr_bound = temp # Also reset the visited array visited = [ False ] * len ( visited ) for j in range ( level ): if curr_path [ j ] != - 1 : visited [ curr_path [ j ]] = True # This function sets up final_path def TSP ( adj ): # Calculate initial lower bound for the root node # using the formula 1/2 * (sum of first min + # second min) for all edges. Also initialize the # curr_path and visited array curr_bound = 0 curr_path = [ - 1 ] * ( N + 1 ) visited = [ False ] * N # Compute initial bound for i in range ( N ): curr_bound += ( firstMin ( adj i ) + secondMin ( adj i )) # Rounding off the lower bound to an integer curr_bound = math . ceil ( curr_bound / 2 ) # We start at vertex 1 so the first vertex # in curr_path[] is 0 visited [ 0 ] = True curr_path [ 0 ] = 0 # Call to TSPRec for curr_weight # equal to 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path visited ) # Driver code # Adjacency matrix for the given graph adj = [[ 0 10 15 20 ] [ 10 0 35 25 ] [ 15 35 0 30 ] [ 20 25 30 0 ]] N = 4 # final_path[] stores the final solution # i.e. the // path of the salesman. final_path = [ None ] * ( N + 1 ) # visited[] keeps track of the already # visited nodes in a particular path visited = [ False ] * N # Stores the final minimum weight # of shortest tour. final_res = maxsize TSP ( adj ) print ( 'Minimum cost :' final_res ) print ( 'Path Taken : ' end = ' ' ) for i in range ( N + 1 ): print ( final_path [ i ] end = ' ' ) # This code is contributed by ng24_7
C# // C# program to solve Traveling Salesman Problem // using Branch and Bound. using System ; public class GFG { static int N = 4 ; // final_path[] stores the final solution ie the // path of the salesman. static int [] final_path = new int [ N + 1 ]; // visited[] keeps track of the already visited nodes // in a particular path static bool [] visited = new bool [ N ]; // Stores the final minimum weight of shortest tour. static int final_res = Int32 . MaxValue ; // Function to copy temporary solution to // the final solution static void copyToFinal ( int [] curr_path ) { for ( int i = 0 ; i < N ; i ++ ) final_path [ i ] = curr_path [ i ]; final_path [ N ] = curr_path [ 0 ]; } // Function to find the minimum edge cost // having an end at the vertex i static int firstMin ( int [ ] adj int i ) { int min = Int32 . MaxValue ; for ( int k = 0 ; k < N ; k ++ ) if ( adj [ i k ] < min && i != k ) min = adj [ i k ]; return min ; } // function to find the second minimum edge cost // having an end at the vertex i static int secondMin ( int [ ] adj int i ) { int first = Int32 . MaxValue second = Int32 . MaxValue ; for ( int j = 0 ; j < N ; j ++ ) { if ( i == j ) continue ; if ( adj [ i j ] <= first ) { second = first ; first = adj [ i j ]; } else if ( adj [ i j ] <= second && adj [ i j ] != first ) second = adj [ i j ]; } return second ; } // function that takes as arguments: // curr_bound -> lower bound of the root node // curr_weight-> stores the weight of the path so far // level-> current level while moving in the search // space tree // curr_path[] -> where the solution is being stored // which // would later be copied to final_path[] static void TSPRec ( int [ ] adj int curr_bound int curr_weight int level int [] curr_path ) { // base case is when we have reached level N which // means we have covered all the nodes once if ( level == N ) { // check if there is an edge from last vertex in // path back to the first vertex if ( adj [ curr_path [ level - 1 ] curr_path [ 0 ]] != 0 ) { // curr_res has the total weight of the // solution we got int curr_res = curr_weight + adj [ curr_path [ level - 1 ] curr_path [ 0 ]]; // Update final result and final path if // current result is better. if ( curr_res < final_res ) { copyToFinal ( curr_path ); final_res = curr_res ; } } return ; } // for any other level iterate for all vertices to // build the search space tree recursively for ( int i = 0 ; i < N ; i ++ ) { // Consider next vertex if it is not same // (diagonal entry in adjacency matrix and not // visited already) if ( adj [ curr_path [ level - 1 ] i ] != 0 && visited [ i ] == false ) { int temp = curr_bound ; curr_weight += adj [ curr_path [ level - 1 ] i ]; // different computation of curr_bound for // level 2 from the other levels if ( level == 1 ) curr_bound -= (( firstMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ); else curr_bound -= (( secondMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ); // curr_bound + curr_weight is the actual // lower bound for the node that we have // arrived on If current lower bound < // final_res we need to explore the node // further if ( curr_bound + curr_weight < final_res ) { curr_path [ level ] = i ; visited [ i ] = true ; // call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path ); } // Else we have to prune the node by // resetting all changes to curr_weight and // curr_bound curr_weight -= adj [ curr_path [ level - 1 ] i ]; curr_bound = temp ; // Also reset the visited array Array . Fill ( visited false ); for ( int j = 0 ; j <= level - 1 ; j ++ ) visited [ curr_path [ j ]] = true ; } } } // This function sets up final_path[] static void TSP ( int [ ] adj ) { int [] curr_path = new int [ N + 1 ]; // Calculate initial lower bound for the root node // using the formula 1/2 * (sum of first min + // second min) for all edges. // Also initialize the curr_path and visited array int curr_bound = 0 ; Array . Fill ( curr_path - 1 ); Array . Fill ( visited false ); // Compute initial bound for ( int i = 0 ; i < N ; i ++ ) curr_bound += ( firstMin ( adj i ) + secondMin ( adj i )); // Rounding off the lower bound to an integer curr_bound = ( curr_bound == 1 ) ? curr_bound / 2 + 1 : curr_bound / 2 ; // We start at vertex 1 so the first vertex // in curr_path[] is 0 visited [ 0 ] = true ; curr_path [ 0 ] = 0 ; // Call to TSPRec for curr_weight equal to // 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path ); } // Driver code static public void Main () { // Adjacency matrix for the given graph int [ ] adj = { { 0 10 15 20 } { 10 0 35 25 } { 15 35 0 30 } { 20 25 30 0 } }; TSP ( adj ); Console . WriteLine ( 'Minimum cost : ' + final_res ); Console . Write ( 'Path Taken : ' ); for ( int i = 0 ; i <= N ; i ++ ) { Console . Write ( final_path [ i ] + ' ' ); } } } // This code is contributed by Rohit Pradhan
JavaScript const N = 4 ; // final_path[] stores the final solution ie the // path of the salesman. let final_path = Array ( N + 1 ). fill ( - 1 ); // visited[] keeps track of the already visited nodes // in a particular path let visited = Array ( N ). fill ( false ); // Stores the final minimum weight of shortest tour. let final_res = Number . MAX_SAFE_INTEGER ; // Function to copy temporary solution to // the final solution function copyToFinal ( curr_path ){ for ( let i = 0 ; i < N ; i ++ ){ final_path [ i ] = curr_path [ i ]; } final_path [ N ] = curr_path [ 0 ]; } // Function to find the minimum edge cost // having an end at the vertex i function firstMin ( adj i ){ let min = Number . MAX_SAFE_INTEGER ; for ( let k = 0 ; k < N ; k ++ ){ if ( adj [ i ][ k ] < min && i !== k ){ min = adj [ i ][ k ]; } } return min ; } // function to find the second minimum edge cost // having an end at the vertex i function secondMin ( adj i ){ let first = Number . MAX_SAFE_INTEGER ; let second = Number . MAX_SAFE_INTEGER ; for ( let j = 0 ; j < N ; j ++ ){ if ( i == j ){ continue ; } if ( adj [ i ][ j ] <= first ){ second = first ; first = adj [ i ][ j ]; } else if ( adj [ i ][ j ] <= second && adj [ i ][ j ] !== first ){ second = adj [ i ][ j ]; } } return second ; } // function that takes as arguments: // curr_bound -> lower bound of the root node // curr_weight-> stores the weight of the path so far // level-> current level while moving in the search // space tree // curr_path[] -> where the solution is being stored which // would later be copied to final_path[] function TSPRec ( adj curr_bound curr_weight level curr_path ) { // base case is when we have reached level N which // means we have covered all the nodes once if ( level == N ) { // check if there is an edge from last vertex in // path back to the first vertex if ( adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]] !== 0 ) { // curr_res has the total weight of the // solution we got let curr_res = curr_weight + adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]]; // Update final result and final path if // current result is better. if ( curr_res < final_res ) { copyToFinal ( curr_path ); final_res = curr_res ; } } return ; } // for any other level iterate for all vertices to // build the search space tree recursively for ( let i = 0 ; i < N ; i ++ ){ // Consider next vertex if it is not same (diagonal // entry in adjacency matrix and not visited // already) if ( adj [ curr_path [ level - 1 ]][ i ] !== 0 && ! visited [ i ]){ let temp = curr_bound ; curr_weight += adj [ curr_path [ level - 1 ]][ i ]; // different computation of curr_bound for // level 2 from the other levels if ( level == 1 ){ curr_bound -= ( firstMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ; } else { curr_bound -= ( secondMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ; } // curr_bound + curr_weight is the actual lower bound // for the node that we have arrived on // If current lower bound < final_res we need to explore // the node further if ( curr_bound + curr_weight < final_res ){ curr_path [ level ] = i ; visited [ i ] = true ; // call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path ); } // Else we have to prune the node by resetting // all changes to curr_weight and curr_bound curr_weight -= adj [ curr_path [ level - 1 ]][ i ]; curr_bound = temp ; // Also reset the visited array visited . fill ( false ) for ( var j = 0 ; j <= level - 1 ; j ++ ) visited [ curr_path [ j ]] = true ; } } } // This function sets up final_path[] function TSP ( adj ) { let curr_path = Array ( N + 1 ). fill ( - 1 ); // Calculate initial lower bound for the root node // using the formula 1/2 * (sum of first min + // second min) for all edges. // Also initialize the curr_path and visited array let curr_bound = 0 ; visited . fill ( false ); // compute initial bound for ( let i = 0 ; i < N ; i ++ ){ curr_bound += firstMin ( adj i ) + secondMin ( adj i ); } // Rounding off the lower bound to an integer curr_bound = curr_bound == 1 ? ( curr_bound / 2 ) + 1 : ( curr_bound / 2 ); // We start at vertex 1 so the first vertex // in curr_path[] is 0 visited [ 0 ] = true ; curr_path [ 0 ] = 0 ; // Call to TSPRec for curr_weight equal to // 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path ); } //Adjacency matrix for the given graph let adj = [[ 0 10 15 20 ] [ 10 0 35 25 ] [ 15 35 0 30 ] [ 20 25 30 0 ]]; TSP ( adj ); console . log ( `Minimum cost: ${ final_res } ` ); console . log ( `Path Taken: ${ final_path . join ( ' ' ) } ` ); // This code is contributed by anskalyan3.
Izlaz:
Minimum cost : 80 Path Taken : 0 1 3 2 0
Zaokruživanje se vrši u ovoj liniji koda:
if (level==1) curr_bound -= ((firstMin(adj curr_path[level-1]) + firstMin(adj i))/2); else curr_bound -= ((secondMin(adj curr_path[level-1]) + firstMin(adj i))/2);
U grani i vezanom algoritmu TSP izračunavamo nižu granicu ukupnog troška optimalnog rješenja dodavanjem minimalnih rubnih troškova za svaki vrh, a zatim dijelimo s dva. Međutim, ova donja granica možda nije cijeli broj. Da bismo dobili cjelobrojnu donju granicu, možemo koristiti zaokruživanje.
U gornjem kodu varijabla curr_bound drži trenutnu donju granicu ukupnog troška optimalnog rješenja. Kada posjetimo novi vrhovi na razini razine, izračunali smo novi donji granični New_bound uzimajući zbroj minimalnih troškova za novi Vertex i njegova dva najbliža susjeda. Zatim ažuriramo varijablu Curr_bound zaokruživanjem New_bounda na najbliži cijeli broj.
Ako je razina 1, zaokružujemo do najbližeg cijelog broja. To je zato što smo do sada posjetili samo jednu vrhovu i želimo biti konzervativni u našoj procjeni ukupnih troškova optimalnog rješenja. Ako je razina veća od 1, koristimo agresivniju strategiju zaokruživanja koja uzima u obzir činjenicu da smo već posjetili neke vrhove i stoga možemo točniju procjenu ukupnog troška optimalnog rješenja.
Vremenska složenost: Najgori slučaj složenosti grane i vezanja ostaje ista kao i onu grube sile, jer u najgorem slučaju možda nikada nećemo dobiti priliku obrezati čvor. Dok se u praksi vrlo dobro izvodi ovisno o različitoj instanci TSP -a. Složenost također ovisi o izboru granične funkcije jer su oni koji odlučuju koliko čvorova treba obrezati.
REFERENCE:
http://lcm.csa.iisc.ernet.in/dsa/node187.html