Reisehalterprobleme mit Branch und gebunden

Bei einer Reihe von Städten und einem Abstand zwischen jedem Städtepaar besteht das Problem darin, die kürzeste Tour zu finden, die jede Stadt genau einmal besucht und zum Startpunkt zurückkehrt.

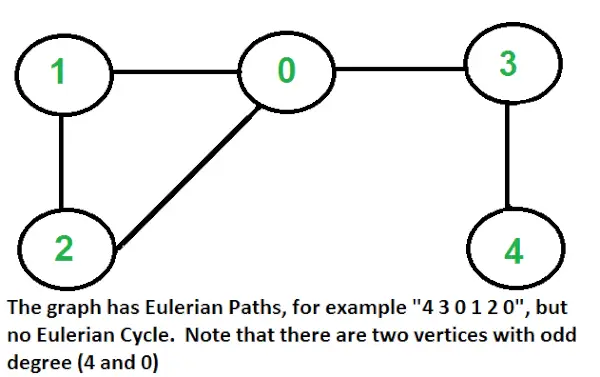
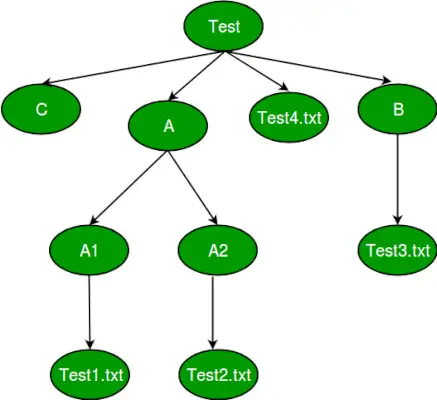
Betrachten Sie beispielsweise das in Abbildung gezeigte Diagramm auf der rechten Seite. Eine TSP-Tour in der Grafik ist 0-1-3-2-0. Die Kosten für die Tour betragen 10+25+30+15, was 80 beträgt.
Wir haben die folgenden Lösungen besprochen
1) Naive und dynamische Programmierung
2) Ungefähre Lösung mit MST
Zweig und gebundene Lösung
Wie in den vorherigen Artikeln in der Zweig- und gebundenen Methode für den aktuellen Knoten im Baum zu sehen ist, berechnen wir eine gebundene Lösung, die wir erhalten können, wenn wir diesen Knoten herunterfahren. Wenn die gebundene Lösung selbst schlechter als aktuell am besten ist (bisher am besten berechnet), ignorieren wir den mit dem Knoten verwurzelten Subtree.
Beachten Sie, dass die Kosten durch einen Knoten zwei Kosten enthalten.
1) Kosten für die Erreichung des Knotens vom Wurzel (wenn wir einen Knoten erreichen, haben wir diese Kosten berechnet)
2) Kosten für die Erreichung einer Antwort vom aktuellen Knoten zu einem Blatt (wir berechnen eine Grenze für diese Kosten, um zu entscheiden, ob Substree mit diesem Knoten ignoriert werden soll oder nicht).
- In Fällen von a Maximierungsproblem Eine Obergrenze zeigt die maximal mögliche Lösung an, wenn wir dem angegebenen Knoten folgen. Zum Beispiel in 0/1 Rucksack Wir haben einen gierigen Ansatz verwendet, um eine Obergrenze zu finden .
- In Fällen von a Minimierungsproblem Eine untere Grenze gibt die minimal mögliche Lösung an, wenn wir dem angegebenen Knoten folgen. Zum Beispiel in Auftragsproblem Wir erhalten eine niedrigere Grenze, indem wir einem Arbeitnehmer am wenigsten Kosten zuweisen.
Im Zweig und gebunden ist der herausfordernde Teil einen Weg, um eine gebundene für die bestmögliche Lösung zu berechnen. Im Folgenden finden Sie eine Idee, die zum Berechnen von Grenzen für das Problem der reisenden Verkäufer verwendet wird.
Die Kosten für jede Tour können wie unten geschrieben werden.
Cost of a tour T = (1/2) * ? (Sum of cost of two edges adjacent to u and in the tour T) where u ? V For every vertex u if we consider two edges through it in T and sum their costs. The overall sum for all vertices would be twice of cost of tour T (We have considered every edge twice.) (Sum of two tour edges adjacent to u) >= (sum of minimum weight two edges adjacent to u) Cost of any tour >= 1/2) * ? (Sum of cost of two minimum weight edges adjacent to u) where u ? V
Betrachten Sie beispielsweise das obige Graph. Im Folgenden finden Sie Mindestkosten zwei an jedem Knoten nebeneinander.
Node Least cost edges Total cost 0 (0 1) (0 2) 25 1 (0 1) (1 3) 35 2 (0 2) (2 3) 45 3 (0 3) (1 3) 45 Thus a lower bound on the cost of any tour = 1/2(25 + 35 + 45 + 45) = 75 Refer this for one more example.
Jetzt haben wir eine Vorstellung über die Berechnung der Untergrenze. Lassen Sie uns sehen, wie Sie es anwenden können, was der Platz für Raumsuche anwendet. Wir beginnen alle möglichen Knoten aufzählen (vorzugsweise in lexikografischer Reihenfolge)
1. Der Wurzelknoten: Ohne Verlust der Allgemeinheit gehen wir davon aus, dass wir bei Scheitelpunkt '0' beginnen, für die die untere Grenze oben berechnet wurde.
Umgang mit Level 2: Die nächste Stufe zählt alle möglichen Scheitelpunkte auf, auf die wir gehen können (bedenken Sie, dass ein Scheitelpunkt nur einmal auftreten muss), die 1 2 3 ... n sind (beachten Sie, dass der Diagramm vollständig ist). Bedenken Sie, dass wir für den Scheitelpunkt 1 berechnen, da wir von 0 auf 1 umgezogen sind. Unsere Tour hat nun den Edge 0-1 enthalten. Dies ermöglicht es uns, die erforderlichen Änderungen in der Untergrenze der Wurzel vorzunehmen.
Lower Bound for vertex 1 = Old lower bound - ((minimum edge cost of 0 + minimum edge cost of 1) / 2) + (edge cost 0-1)
Wie funktioniert es? Um Edge 0-1 einzuschließen, fügen wir die Kantenkosten von 0-1 hinzu und subtrahieren ein Kantengewicht so, dass die untere Grenze so eng wie möglich bleibt, was die Summe der Mindestkanten von 0 und 1 geteilt wäre, die durch 2. eindeutig subtrahiert werden kann, kann nicht kleiner sein als diese.
Umgang mit anderen Ebenen: Während wir mit der nächsten Ebene übergehen, zählen wir erneut alle möglichen Scheitelpunkte auf. Für den oben genannten Fall nach 1 schauen wir uns für 2 3 4 ... n an.
Betrachten Sie die untere Grenze für 2, als wir von 1 auf 1 umgezogen sind. Wir haben die Kante 1-2 in die Tour ein und ändern die neue Untergrenze für diesen Knoten.
Lower bound(2) = Old lower bound - ((second minimum edge cost of 1 + minimum edge cost of 2)/2) + edge cost 1-2)
HINWEIS: Die einzige Änderung der Formel ist, dass wir dieses Mal die zweiten Mindestkantenkosten für 1 aufgenommen haben, da die Mindestkantenkosten bereits in vorheriger Ebene abgezogen wurden.
// C++ program to solve Traveling Salesman Problem // using Branch and Bound. #include using namespace std ; const int N = 4 ; // final_path[] stores the final solution ie the // path of the salesman. int final_path [ N + 1 ]; // visited[] keeps track of the already visited nodes // in a particular path bool visited [ N ]; // Stores the final minimum weight of shortest tour. int final_res = INT_MAX ; // Function to copy temporary solution to // the final solution void copyToFinal ( int curr_path []) { for ( int i = 0 ; i < N ; i ++ ) final_path [ i ] = curr_path [ i ]; final_path [ N ] = curr_path [ 0 ]; } // Function to find the minimum edge cost // having an end at the vertex i int firstMin ( int adj [ N ][ N ] int i ) { int min = INT_MAX ; for ( int k = 0 ; k < N ; k ++ ) if ( adj [ i ][ k ] < min && i != k ) min = adj [ i ][ k ]; return min ; } // function to find the second minimum edge cost // having an end at the vertex i int secondMin ( int adj [ N ][ N ] int i ) { int first = INT_MAX second = INT_MAX ; for ( int j = 0 ; j < N ; j ++ ) { if ( i == j ) continue ; if ( adj [ i ][ j ] <= first ) { second = first ; first = adj [ i ][ j ]; } else if ( adj [ i ][ j ] <= second && adj [ i ][ j ] != first ) second = adj [ i ][ j ]; } return second ; } // function that takes as arguments: // curr_bound -> lower bound of the root node // curr_weight-> stores the weight of the path so far // level-> current level while moving in the search // space tree // curr_path[] -> where the solution is being stored which // would later be copied to final_path[] void TSPRec ( int adj [ N ][ N ] int curr_bound int curr_weight int level int curr_path []) { // base case is when we have reached level N which // means we have covered all the nodes once if ( level == N ) { // check if there is an edge from last vertex in // path back to the first vertex if ( adj [ curr_path [ level -1 ]][ curr_path [ 0 ]] != 0 ) { // curr_res has the total weight of the // solution we got int curr_res = curr_weight + adj [ curr_path [ level -1 ]][ curr_path [ 0 ]]; // Update final result and final path if // current result is better. if ( curr_res < final_res ) { copyToFinal ( curr_path ); final_res = curr_res ; } } return ; } // for any other level iterate for all vertices to // build the search space tree recursively for ( int i = 0 ; i < N ; i ++ ) { // Consider next vertex if it is not same (diagonal // entry in adjacency matrix and not visited // already) if ( adj [ curr_path [ level -1 ]][ i ] != 0 && visited [ i ] == false ) { int temp = curr_bound ; curr_weight += adj [ curr_path [ level -1 ]][ i ]; // different computation of curr_bound for // level 2 from the other levels if ( level == 1 ) curr_bound -= (( firstMin ( adj curr_path [ level -1 ]) + firstMin ( adj i )) / 2 ); else curr_bound -= (( secondMin ( adj curr_path [ level -1 ]) + firstMin ( adj i )) / 2 ); // curr_bound + curr_weight is the actual lower bound // for the node that we have arrived on // If current lower bound < final_res we need to explore // the node further if ( curr_bound + curr_weight < final_res ) { curr_path [ level ] = i ; visited [ i ] = true ; // call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path ); } // Else we have to prune the node by resetting // all changes to curr_weight and curr_bound curr_weight -= adj [ curr_path [ level -1 ]][ i ]; curr_bound = temp ; // Also reset the visited array memset ( visited false sizeof ( visited )); for ( int j = 0 ; j <= level -1 ; j ++ ) visited [ curr_path [ j ]] = true ; } } } // This function sets up final_path[] void TSP ( int adj [ N ][ N ]) { int curr_path [ N + 1 ]; // Calculate initial lower bound for the root node // using the formula 1/2 * (sum of first min + // second min) for all edges. // Also initialize the curr_path and visited array int curr_bound = 0 ; memset ( curr_path -1 sizeof ( curr_path )); memset ( visited 0 sizeof ( curr_path )); // Compute initial bound for ( int i = 0 ; i < N ; i ++ ) curr_bound += ( firstMin ( adj i ) + secondMin ( adj i )); // Rounding off the lower bound to an integer curr_bound = ( curr_bound & 1 ) ? curr_bound / 2 + 1 : curr_bound / 2 ; // We start at vertex 1 so the first vertex // in curr_path[] is 0 visited [ 0 ] = true ; curr_path [ 0 ] = 0 ; // Call to TSPRec for curr_weight equal to // 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path ); } // Driver code int main () { //Adjacency matrix for the given graph int adj [ N ][ N ] = { { 0 10 15 20 } { 10 0 35 25 } { 15 35 0 30 } { 20 25 30 0 } }; TSP ( adj ); printf ( 'Minimum cost : %d n ' final_res ); printf ( 'Path Taken : ' ); for ( int i = 0 ; i <= N ; i ++ ) printf ( '%d ' final_path [ i ]); return 0 ; }
Java // Java program to solve Traveling Salesman Problem // using Branch and Bound. import java.util.* ; class GFG { static int N = 4 ; // final_path[] stores the final solution ie the // path of the salesman. static int final_path [] = new int [ N + 1 ] ; // visited[] keeps track of the already visited nodes // in a particular path static boolean visited [] = new boolean [ N ] ; // Stores the final minimum weight of shortest tour. static int final_res = Integer . MAX_VALUE ; // Function to copy temporary solution to // the final solution static void copyToFinal ( int curr_path [] ) { for ( int i = 0 ; i < N ; i ++ ) final_path [ i ] = curr_path [ i ] ; final_path [ N ] = curr_path [ 0 ] ; } // Function to find the minimum edge cost // having an end at the vertex i static int firstMin ( int adj [][] int i ) { int min = Integer . MAX_VALUE ; for ( int k = 0 ; k < N ; k ++ ) if ( adj [ i ][ k ] < min && i != k ) min = adj [ i ][ k ] ; return min ; } // function to find the second minimum edge cost // having an end at the vertex i static int secondMin ( int adj [][] int i ) { int first = Integer . MAX_VALUE second = Integer . MAX_VALUE ; for ( int j = 0 ; j < N ; j ++ ) { if ( i == j ) continue ; if ( adj [ i ][ j ] <= first ) { second = first ; first = adj [ i ][ j ] ; } else if ( adj [ i ][ j ] <= second && adj [ i ][ j ] != first ) second = adj [ i ][ j ] ; } return second ; } // function that takes as arguments: // curr_bound -> lower bound of the root node // curr_weight-> stores the weight of the path so far // level-> current level while moving in the search // space tree // curr_path[] -> where the solution is being stored which // would later be copied to final_path[] static void TSPRec ( int adj [][] int curr_bound int curr_weight int level int curr_path [] ) { // base case is when we have reached level N which // means we have covered all the nodes once if ( level == N ) { // check if there is an edge from last vertex in // path back to the first vertex if ( adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]] != 0 ) { // curr_res has the total weight of the // solution we got int curr_res = curr_weight + adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]] ; // Update final result and final path if // current result is better. if ( curr_res < final_res ) { copyToFinal ( curr_path ); final_res = curr_res ; } } return ; } // for any other level iterate for all vertices to // build the search space tree recursively for ( int i = 0 ; i < N ; i ++ ) { // Consider next vertex if it is not same (diagonal // entry in adjacency matrix and not visited // already) if ( adj [ curr_path [ level - 1 ]][ i ] != 0 && visited [ i ] == false ) { int temp = curr_bound ; curr_weight += adj [ curr_path [ level - 1 ]][ i ] ; // different computation of curr_bound for // level 2 from the other levels if ( level == 1 ) curr_bound -= (( firstMin ( adj curr_path [ level - 1 ] ) + firstMin ( adj i )) / 2 ); else curr_bound -= (( secondMin ( adj curr_path [ level - 1 ] ) + firstMin ( adj i )) / 2 ); // curr_bound + curr_weight is the actual lower bound // for the node that we have arrived on // If current lower bound < final_res we need to explore // the node further if ( curr_bound + curr_weight < final_res ) { curr_path [ level ] = i ; visited [ i ] = true ; // call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path ); } // Else we have to prune the node by resetting // all changes to curr_weight and curr_bound curr_weight -= adj [ curr_path [ level - 1 ]][ i ] ; curr_bound = temp ; // Also reset the visited array Arrays . fill ( visited false ); for ( int j = 0 ; j <= level - 1 ; j ++ ) visited [ curr_path [ j ]] = true ; } } } // This function sets up final_path[] static void TSP ( int adj [][] ) { int curr_path [] = new int [ N + 1 ] ; // Calculate initial lower bound for the root node // using the formula 1/2 * (sum of first min + // second min) for all edges. // Also initialize the curr_path and visited array int curr_bound = 0 ; Arrays . fill ( curr_path - 1 ); Arrays . fill ( visited false ); // Compute initial bound for ( int i = 0 ; i < N ; i ++ ) curr_bound += ( firstMin ( adj i ) + secondMin ( adj i )); // Rounding off the lower bound to an integer curr_bound = ( curr_bound == 1 ) ? curr_bound / 2 + 1 : curr_bound / 2 ; // We start at vertex 1 so the first vertex // in curr_path[] is 0 visited [ 0 ] = true ; curr_path [ 0 ] = 0 ; // Call to TSPRec for curr_weight equal to // 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path ); } // Driver code public static void main ( String [] args ) { //Adjacency matrix for the given graph int adj [][] = {{ 0 10 15 20 } { 10 0 35 25 } { 15 35 0 30 } { 20 25 30 0 } }; TSP ( adj ); System . out . printf ( 'Minimum cost : %dn' final_res ); System . out . printf ( 'Path Taken : ' ); for ( int i = 0 ; i <= N ; i ++ ) { System . out . printf ( '%d ' final_path [ i ] ); } } } /* This code contributed by PrinciRaj1992 */
Python3 # Python3 program to solve # Traveling Salesman Problem using # Branch and Bound. import math maxsize = float ( 'inf' ) # Function to copy temporary solution # to the final solution def copyToFinal ( curr_path ): final_path [: N + 1 ] = curr_path [:] final_path [ N ] = curr_path [ 0 ] # Function to find the minimum edge cost # having an end at the vertex i def firstMin ( adj i ): min = maxsize for k in range ( N ): if adj [ i ][ k ] < min and i != k : min = adj [ i ][ k ] return min # function to find the second minimum edge # cost having an end at the vertex i def secondMin ( adj i ): first second = maxsize maxsize for j in range ( N ): if i == j : continue if adj [ i ][ j ] <= first : second = first first = adj [ i ][ j ] elif ( adj [ i ][ j ] <= second and adj [ i ][ j ] != first ): second = adj [ i ][ j ] return second # function that takes as arguments: # curr_bound -> lower bound of the root node # curr_weight-> stores the weight of the path so far # level-> current level while moving # in the search space tree # curr_path[] -> where the solution is being stored # which would later be copied to final_path[] def TSPRec ( adj curr_bound curr_weight level curr_path visited ): global final_res # base case is when we have reached level N # which means we have covered all the nodes once if level == N : # check if there is an edge from # last vertex in path back to the first vertex if adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]] != 0 : # curr_res has the total weight # of the solution we got curr_res = curr_weight + adj [ curr_path [ level - 1 ]] [ curr_path [ 0 ]] if curr_res < final_res : copyToFinal ( curr_path ) final_res = curr_res return # for any other level iterate for all vertices # to build the search space tree recursively for i in range ( N ): # Consider next vertex if it is not same # (diagonal entry in adjacency matrix and # not visited already) if ( adj [ curr_path [ level - 1 ]][ i ] != 0 and visited [ i ] == False ): temp = curr_bound curr_weight += adj [ curr_path [ level - 1 ]][ i ] # different computation of curr_bound # for level 2 from the other levels if level == 1 : curr_bound -= (( firstMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ) else : curr_bound -= (( secondMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ) # curr_bound + curr_weight is the actual lower bound # for the node that we have arrived on. # If current lower bound < final_res # we need to explore the node further if curr_bound + curr_weight < final_res : curr_path [ level ] = i visited [ i ] = True # call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path visited ) # Else we have to prune the node by resetting # all changes to curr_weight and curr_bound curr_weight -= adj [ curr_path [ level - 1 ]][ i ] curr_bound = temp # Also reset the visited array visited = [ False ] * len ( visited ) for j in range ( level ): if curr_path [ j ] != - 1 : visited [ curr_path [ j ]] = True # This function sets up final_path def TSP ( adj ): # Calculate initial lower bound for the root node # using the formula 1/2 * (sum of first min + # second min) for all edges. Also initialize the # curr_path and visited array curr_bound = 0 curr_path = [ - 1 ] * ( N + 1 ) visited = [ False ] * N # Compute initial bound for i in range ( N ): curr_bound += ( firstMin ( adj i ) + secondMin ( adj i )) # Rounding off the lower bound to an integer curr_bound = math . ceil ( curr_bound / 2 ) # We start at vertex 1 so the first vertex # in curr_path[] is 0 visited [ 0 ] = True curr_path [ 0 ] = 0 # Call to TSPRec for curr_weight # equal to 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path visited ) # Driver code # Adjacency matrix for the given graph adj = [[ 0 10 15 20 ] [ 10 0 35 25 ] [ 15 35 0 30 ] [ 20 25 30 0 ]] N = 4 # final_path[] stores the final solution # i.e. the // path of the salesman. final_path = [ None ] * ( N + 1 ) # visited[] keeps track of the already # visited nodes in a particular path visited = [ False ] * N # Stores the final minimum weight # of shortest tour. final_res = maxsize TSP ( adj ) print ( 'Minimum cost :' final_res ) print ( 'Path Taken : ' end = ' ' ) for i in range ( N + 1 ): print ( final_path [ i ] end = ' ' ) # This code is contributed by ng24_7
C# // C# program to solve Traveling Salesman Problem // using Branch and Bound. using System ; public class GFG { static int N = 4 ; // final_path[] stores the final solution ie the // path of the salesman. static int [] final_path = new int [ N + 1 ]; // visited[] keeps track of the already visited nodes // in a particular path static bool [] visited = new bool [ N ]; // Stores the final minimum weight of shortest tour. static int final_res = Int32 . MaxValue ; // Function to copy temporary solution to // the final solution static void copyToFinal ( int [] curr_path ) { for ( int i = 0 ; i < N ; i ++ ) final_path [ i ] = curr_path [ i ]; final_path [ N ] = curr_path [ 0 ]; } // Function to find the minimum edge cost // having an end at the vertex i static int firstMin ( int [ ] adj int i ) { int min = Int32 . MaxValue ; for ( int k = 0 ; k < N ; k ++ ) if ( adj [ i k ] < min && i != k ) min = adj [ i k ]; return min ; } // function to find the second minimum edge cost // having an end at the vertex i static int secondMin ( int [ ] adj int i ) { int first = Int32 . MaxValue second = Int32 . MaxValue ; for ( int j = 0 ; j < N ; j ++ ) { if ( i == j ) continue ; if ( adj [ i j ] <= first ) { second = first ; first = adj [ i j ]; } else if ( adj [ i j ] <= second && adj [ i j ] != first ) second = adj [ i j ]; } return second ; } // function that takes as arguments: // curr_bound -> lower bound of the root node // curr_weight-> stores the weight of the path so far // level-> current level while moving in the search // space tree // curr_path[] -> where the solution is being stored // which // would later be copied to final_path[] static void TSPRec ( int [ ] adj int curr_bound int curr_weight int level int [] curr_path ) { // base case is when we have reached level N which // means we have covered all the nodes once if ( level == N ) { // check if there is an edge from last vertex in // path back to the first vertex if ( adj [ curr_path [ level - 1 ] curr_path [ 0 ]] != 0 ) { // curr_res has the total weight of the // solution we got int curr_res = curr_weight + adj [ curr_path [ level - 1 ] curr_path [ 0 ]]; // Update final result and final path if // current result is better. if ( curr_res < final_res ) { copyToFinal ( curr_path ); final_res = curr_res ; } } return ; } // for any other level iterate for all vertices to // build the search space tree recursively for ( int i = 0 ; i < N ; i ++ ) { // Consider next vertex if it is not same // (diagonal entry in adjacency matrix and not // visited already) if ( adj [ curr_path [ level - 1 ] i ] != 0 && visited [ i ] == false ) { int temp = curr_bound ; curr_weight += adj [ curr_path [ level - 1 ] i ]; // different computation of curr_bound for // level 2 from the other levels if ( level == 1 ) curr_bound -= (( firstMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ); else curr_bound -= (( secondMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ); // curr_bound + curr_weight is the actual // lower bound for the node that we have // arrived on If current lower bound < // final_res we need to explore the node // further if ( curr_bound + curr_weight < final_res ) { curr_path [ level ] = i ; visited [ i ] = true ; // call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path ); } // Else we have to prune the node by // resetting all changes to curr_weight and // curr_bound curr_weight -= adj [ curr_path [ level - 1 ] i ]; curr_bound = temp ; // Also reset the visited array Array . Fill ( visited false ); for ( int j = 0 ; j <= level - 1 ; j ++ ) visited [ curr_path [ j ]] = true ; } } } // This function sets up final_path[] static void TSP ( int [ ] adj ) { int [] curr_path = new int [ N + 1 ]; // Calculate initial lower bound for the root node // using the formula 1/2 * (sum of first min + // second min) for all edges. // Also initialize the curr_path and visited array int curr_bound = 0 ; Array . Fill ( curr_path - 1 ); Array . Fill ( visited false ); // Compute initial bound for ( int i = 0 ; i < N ; i ++ ) curr_bound += ( firstMin ( adj i ) + secondMin ( adj i )); // Rounding off the lower bound to an integer curr_bound = ( curr_bound == 1 ) ? curr_bound / 2 + 1 : curr_bound / 2 ; // We start at vertex 1 so the first vertex // in curr_path[] is 0 visited [ 0 ] = true ; curr_path [ 0 ] = 0 ; // Call to TSPRec for curr_weight equal to // 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path ); } // Driver code static public void Main () { // Adjacency matrix for the given graph int [ ] adj = { { 0 10 15 20 } { 10 0 35 25 } { 15 35 0 30 } { 20 25 30 0 } }; TSP ( adj ); Console . WriteLine ( 'Minimum cost : ' + final_res ); Console . Write ( 'Path Taken : ' ); for ( int i = 0 ; i <= N ; i ++ ) { Console . Write ( final_path [ i ] + ' ' ); } } } // This code is contributed by Rohit Pradhan
JavaScript const N = 4 ; // final_path[] stores the final solution ie the // path of the salesman. let final_path = Array ( N + 1 ). fill ( - 1 ); // visited[] keeps track of the already visited nodes // in a particular path let visited = Array ( N ). fill ( false ); // Stores the final minimum weight of shortest tour. let final_res = Number . MAX_SAFE_INTEGER ; // Function to copy temporary solution to // the final solution function copyToFinal ( curr_path ){ for ( let i = 0 ; i < N ; i ++ ){ final_path [ i ] = curr_path [ i ]; } final_path [ N ] = curr_path [ 0 ]; } // Function to find the minimum edge cost // having an end at the vertex i function firstMin ( adj i ){ let min = Number . MAX_SAFE_INTEGER ; for ( let k = 0 ; k < N ; k ++ ){ if ( adj [ i ][ k ] < min && i !== k ){ min = adj [ i ][ k ]; } } return min ; } // function to find the second minimum edge cost // having an end at the vertex i function secondMin ( adj i ){ let first = Number . MAX_SAFE_INTEGER ; let second = Number . MAX_SAFE_INTEGER ; for ( let j = 0 ; j < N ; j ++ ){ if ( i == j ){ continue ; } if ( adj [ i ][ j ] <= first ){ second = first ; first = adj [ i ][ j ]; } else if ( adj [ i ][ j ] <= second && adj [ i ][ j ] !== first ){ second = adj [ i ][ j ]; } } return second ; } // function that takes as arguments: // curr_bound -> lower bound of the root node // curr_weight-> stores the weight of the path so far // level-> current level while moving in the search // space tree // curr_path[] -> where the solution is being stored which // would later be copied to final_path[] function TSPRec ( adj curr_bound curr_weight level curr_path ) { // base case is when we have reached level N which // means we have covered all the nodes once if ( level == N ) { // check if there is an edge from last vertex in // path back to the first vertex if ( adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]] !== 0 ) { // curr_res has the total weight of the // solution we got let curr_res = curr_weight + adj [ curr_path [ level - 1 ]][ curr_path [ 0 ]]; // Update final result and final path if // current result is better. if ( curr_res < final_res ) { copyToFinal ( curr_path ); final_res = curr_res ; } } return ; } // for any other level iterate for all vertices to // build the search space tree recursively for ( let i = 0 ; i < N ; i ++ ){ // Consider next vertex if it is not same (diagonal // entry in adjacency matrix and not visited // already) if ( adj [ curr_path [ level - 1 ]][ i ] !== 0 && ! visited [ i ]){ let temp = curr_bound ; curr_weight += adj [ curr_path [ level - 1 ]][ i ]; // different computation of curr_bound for // level 2 from the other levels if ( level == 1 ){ curr_bound -= ( firstMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ; } else { curr_bound -= ( secondMin ( adj curr_path [ level - 1 ]) + firstMin ( adj i )) / 2 ; } // curr_bound + curr_weight is the actual lower bound // for the node that we have arrived on // If current lower bound < final_res we need to explore // the node further if ( curr_bound + curr_weight < final_res ){ curr_path [ level ] = i ; visited [ i ] = true ; // call TSPRec for the next level TSPRec ( adj curr_bound curr_weight level + 1 curr_path ); } // Else we have to prune the node by resetting // all changes to curr_weight and curr_bound curr_weight -= adj [ curr_path [ level - 1 ]][ i ]; curr_bound = temp ; // Also reset the visited array visited . fill ( false ) for ( var j = 0 ; j <= level - 1 ; j ++ ) visited [ curr_path [ j ]] = true ; } } } // This function sets up final_path[] function TSP ( adj ) { let curr_path = Array ( N + 1 ). fill ( - 1 ); // Calculate initial lower bound for the root node // using the formula 1/2 * (sum of first min + // second min) for all edges. // Also initialize the curr_path and visited array let curr_bound = 0 ; visited . fill ( false ); // compute initial bound for ( let i = 0 ; i < N ; i ++ ){ curr_bound += firstMin ( adj i ) + secondMin ( adj i ); } // Rounding off the lower bound to an integer curr_bound = curr_bound == 1 ? ( curr_bound / 2 ) + 1 : ( curr_bound / 2 ); // We start at vertex 1 so the first vertex // in curr_path[] is 0 visited [ 0 ] = true ; curr_path [ 0 ] = 0 ; // Call to TSPRec for curr_weight equal to // 0 and level 1 TSPRec ( adj curr_bound 0 1 curr_path ); } //Adjacency matrix for the given graph let adj = [[ 0 10 15 20 ] [ 10 0 35 25 ] [ 15 35 0 30 ] [ 20 25 30 0 ]]; TSP ( adj ); console . log ( `Minimum cost: ${ final_res } ` ); console . log ( `Path Taken: ${ final_path . join ( ' ' ) } ` ); // This code is contributed by anskalyan3.
Ausgabe :
Minimum cost : 80 Path Taken : 0 1 3 2 0
Die Rundung wird in dieser Codezeile durchgeführt:
if (level==1) curr_bound -= ((firstMin(adj curr_path[level-1]) + firstMin(adj i))/2); else curr_bound -= ((secondMin(adj curr_path[level-1]) + firstMin(adj i))/2);
Im Zweig- und gebundenen TSP -Algorithmus berechnen wir eine untere Grenze für die Gesamtkosten der optimalen Lösung, indem wir die minimalen Kantenkosten für jeden Scheitelpunkt addieren und dann durch zwei teilen. Diese Untergrenze ist jedoch möglicherweise keine Ganzzahl. Um eine ganzzahlige Untergrenze zu bekommen, können wir Rundung verwenden.
Im obigen Code hält die Variable Curr_Bound die aktuelle untere Grenze für die Gesamtkosten der optimalen Lösung. Wenn wir einen neuen Scheitelpunkt auf Niveau besuchen, berechnen wir eine neue NEW -BOUND -NEW -NEW -Bunde, indem wir die Summe der Mindestkantenkosten für den neuen Scheitelpunkt und seine beiden nächsten Nachbarn übernehmen. Anschließend aktualisieren wir die Variable Curr_Bound, indem wir New_bound auf die nächste Ganzzahl abrunden.
Wenn das Level 1 ist, runden wir die nächste Ganzzahl ab. Dies liegt daran, dass wir bisher nur einen Scheitelpunkt besucht haben und in unserer Schätzung der Gesamtkosten der optimalen Lösung konservativ sein möchten. Wenn das Niveau größer als 1 ist, verwenden wir eine aggressivere Rundungsstrategie, die die Tatsache berücksichtigt, dass wir bereits einige Scheitelpunkte besucht haben und daher eine genauere Schätzung der Gesamtkosten der optimalen Lösung vornehmen können.
Zeitkomplexität: Die schlimmste Fallkomplexität von Zweig und gebundenem Fall bleibt gleich den der Brute -Kraft, da wir im schlimmsten Fall möglicherweise nie die Chance bekommen, einen Knoten zu beschneiden. Während in der Praxis abhängig von der verschiedenen Instanz des TSP sehr gut funktioniert. Die Komplexität hängt auch von der Auswahl der Begrenzungsfunktion ab, da sie entscheiden, wie viele Knoten beschnitten werden sollen.
Referenzen:
http://lcm.csa.iisc.ernet.in/dsa/node187.html