로봇의 다양한 구성 요소를 보여주는 로봇 구조를 고려하면 다음과 같습니다.
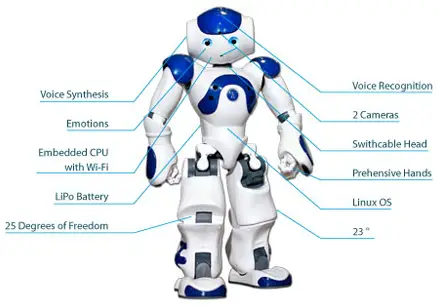
로봇 공학의 주요 구성 요소는 다음과 같습니다.
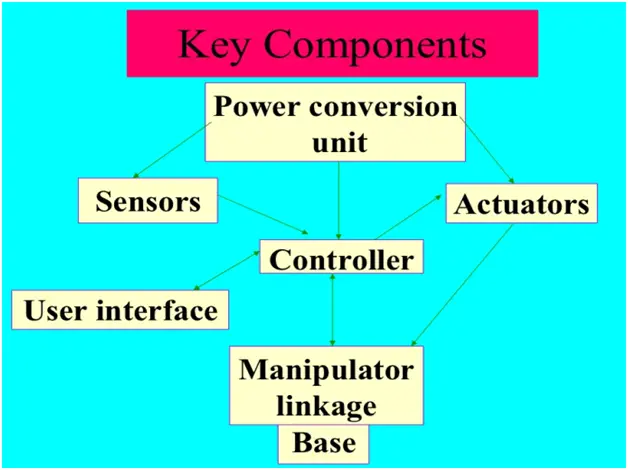
| 전원 공급 장치 - | 로봇의 작동 전력은 배터리, 유압, 태양열 또는 공압 전원을 통해 제공됩니다.
| 액추에이터 - | 액추에이터는 로봇 내부에 사용되는 에너지 변환 장치입니다. 액추에이터의 주요 기능은 에너지를 움직임으로 변환하는 것입니다.
| 전기 모터(DC/AC)- | 모터는 전기 에너지를 동등한 기계 에너지로 변환하는 데 사용되는 전기 기계 부품입니다. 로봇에서 모터는 회전 운동을 제공하는 데 사용됩니다.
| 센서 - | 센서는 작업 환경에 대한 실시간 정보를 제공합니다. 로봇에는 인간 지문의 촉각 수용체의 기계적 특성을 모방하는 촉각 센서가 장착되어 있으며 비전 센서는 환경의 깊이를 계산하는 데 사용됩니다.
| 컨트롤러 - | 컨트롤러는 기계 시스템의 모든 동작을 조정하는 로봇의 일부입니다. 또한 다양한 센서를 통해 주변 환경으로부터 입력을 받습니다. 로봇 컨트롤러의 핵심은 입출력 및 모니터링 장치와 연결된 마이크로프로세서이다. 컨트롤러가 내리는 명령은 다양한 컨트롤러, 액추에이터 및 증폭기로 구성된 모션 제어 메커니즘을 활성화합니다.